图书
图书 资源
资源


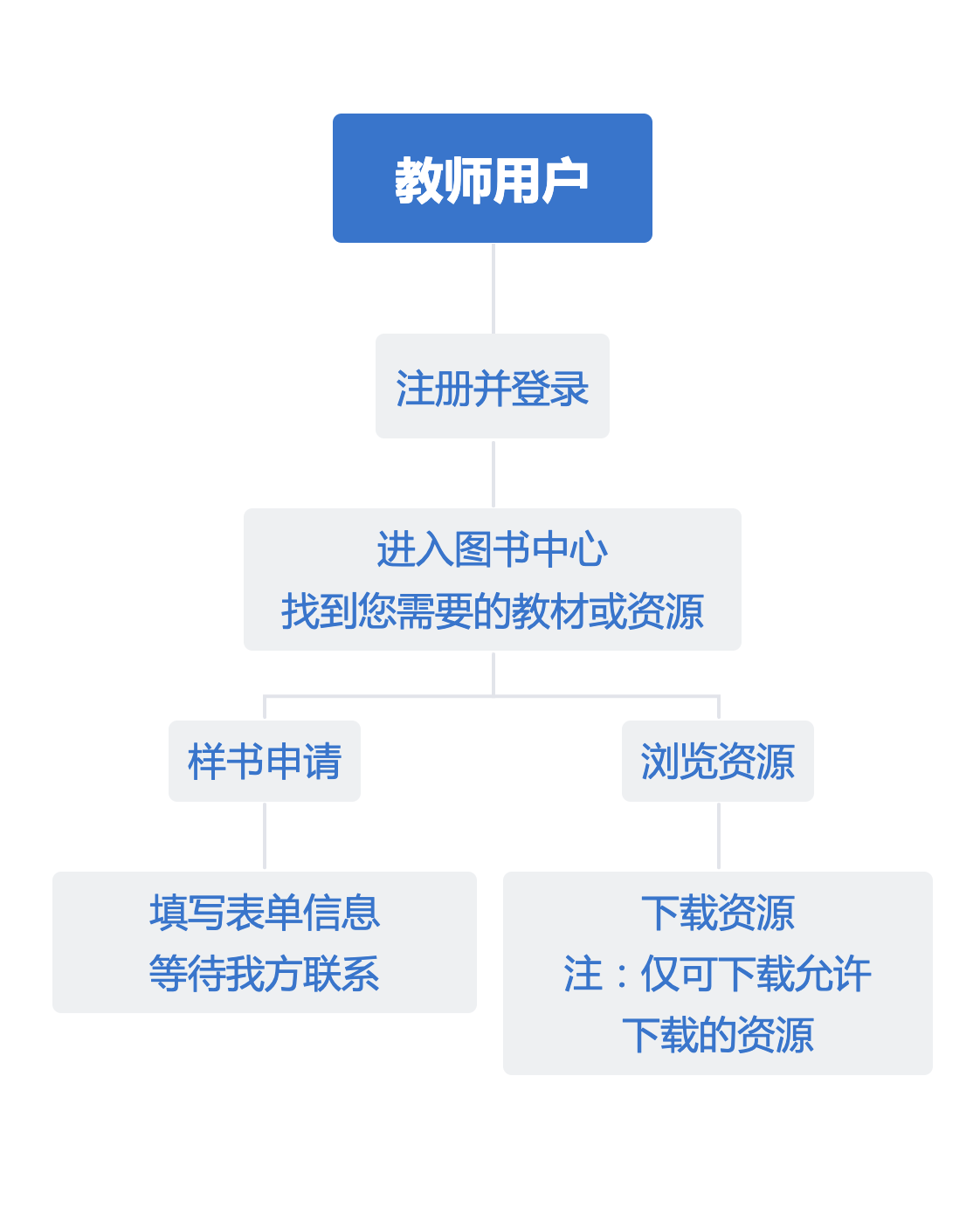
 教师服务直通车
教师服务直通车
- 机器人学:建模、控制与视觉(第2版)
- 作者:熊有伦,等
- 策划编辑:俞道凯
- ISBN:978-7-5680-6235-0
- 图书开本:16
- 出版日期:2025-12-16
- 定价:88.00元去购买
-
重点项目:
- 中国出版政府奖
- 全国教材建设奖
-
新形态教材:
- 二维码资源
- 视频资源
- 所属丛书:智能制造技术系列教材
图书简介
为适应工业机器人、海陆空机器人和共融机器人快速发展的需要,突出机器人学的综合性、新颖性和前瞻性等特点,本书分建模、控制与视觉三个部分系统地阐述了机器人学的基础内容。
全书包含十七章。第1章为概述,介绍机器人的内涵、应用以及机器人学的研究方向。建模部分包括第2章至第7章,系统介绍机器人机构,刚体位姿描述和齐次变换,刚体速度和静力,操作臂运动学、雅可比矩阵和操作臂动力学。控制部分包括第8章至第13章,介绍轨迹生成、轨迹控制、力的控制、运动规划、协调控制和自适应控制。视觉部分包括第14章至第17章,介绍视觉图像处理、视觉运动控制、视觉导航、轮式移动机器人和运动规划。
本书可供从事机器人研究开发的科技工作者参考,也可作为研究型大学本科生和研究生的教学用书。




书籍目录
第1章概述(1)
1.1机器人的内涵(1)
1.2机器人的应用与发展(4)
1.3机器人学的研究展望(7)
1.4机器人学:建模、控制与视觉(11)
第2章机器人机构(14)
2.1运动副(14)
2.2串联机器人机构(15)
2.3并联机器人机构(20)
2.4机器人手爪(24)
2.5探测车悬架机构(27)
2.6多足步行机器人机构(29)
2.7RV减速器和谐波减速器(31)
习题(34)
第3章位姿描述和齐次变换(36)
3.1刚体位姿描述(36)
3.2齐次坐标和齐次变换(40)
3.3运动算子(43)
3.4变换矩阵的运算(44)
3.5RPY角与欧拉角(49)
3.6旋转变换通式(52)
3.7位姿的综合(57)
3.8计算的复杂性(59)
习题(60)
第4章刚体速度和静力(63)
4.1线矢量(63)
4.2微分转动与转动速度(66)
4.3微分运动与运动旋量(71)
4.4刚体变换的线矢量表示(78)
4.5螺旋运动(81)
4.6力旋量(85)
4.7线矢量、旋量与螺旋(88)
习题(90)
第5章操作臂运动学(93)
5.1连杆参数和连杆坐标系(93)
5.2连杆变换和运动学方程(97)
5.3PUMA560机器人运动学反解(102)
5.4指数积公式(107)
5.5运动学方程的自动生成(112)
5.6运动学反解的子问题(114)
5.7运动学的封闭解和解的存在性、唯一性(120)
5.8驱动空间、关节空间和操作空间(123)
习题(125)
第6章操作臂的雅可比矩阵(130)
6.1引例(130)
6.2速度雅可比矩阵(132)
6.3逆雅可比矩阵和奇异性(137)
6.4操作臂的灵巧性(140)
6.5力雅可比矩阵(143)
6.6冗余度机器人(148)
6.7刚度与柔度(152)
6.8误差标定与补偿(154)
习题(157)
第7章操作臂动力学(162)
7.1操作臂动力学概述(162)
7.2质点系与单刚体动力学(163)
7.3拉格朗日动力学(168)
7.4操作臂的拉格朗日方程(171)
7.5拉格朗日方程的其他形式(175)
7.6连杆运动的传递(178)
7.7牛顿欧拉递推动力学方程(182)
7.8基于指数积的牛顿欧拉方法(187)
7.9关节空间和操作空间动力学(189)
7.10动力学性能指标(191)
习题(194)
第8章轨迹生成(196)
8.1轨迹规划的一般性问题(196)
8.2关节轨迹的插值(198)
8.3笛卡儿空间轨迹规划方法(206)
8.4利用四元数进行直线轨迹规划(212)
8.5轨迹的实时生成(217)
习题(219)
第9章操作臂的轨迹控制(221)
9.1操作臂的单关节传递函数及PD控制(222)
9.2二阶线性系统控制器的分解(230)
9.3操作臂的单关节控制规律分解(235)
9.4操作臂的非线性控制(236)
9.5操作臂的多关节控制(238)
9.6基于直角坐标的控制(240)
9.7李雅普诺夫稳定性分析(242)
习题(245)
第10章操作臂的力控制(247)
10.1概述(247)
10.2力力矩传感器(248)
10.3约束运动与约束坐标系(250)
10.4力控制规律的分解(253)
10.5间接力控制(255)
10.6直接力控制(260)
习题(267)
第11章协调控制(268)
11.1概述(268)
11.2双臂协调运动的约束关系(268)
11.3双臂协调的关节力矩计算(273)
11.4多指手爪的运动分析(277)
11.5抓取的稳定性和可操作性(281)
11.6多指抓取规划和协调控制(283)
习题(288)
第12章视觉图像处理(290)
12.1图像传感器与视觉系统(290)
12.2图像几何变换与摄像机成像模型(295)
12.3空间滤波(298)
12.4频域滤波(303)
12.5图像分割(306)
12.6特征提取(309)
12.7图像匹配(312)
12.8图像拼接(316)
习题(319)
第13章视觉运动控制(321)
13.1视觉标定(321)
13.2立体视觉(325)
13.3视觉检测(331)
13.4视觉跟踪(336)
13.5视觉伺服控制(340)
习题(345)
第14章视觉导航定位(346)
14.1概述(346)
14.2视觉里程计(350)
14.3后端优化(357)
14.4回环检测(362)
14.5建图(365)
14.6激光雷达SLAM(369)
14.7多传感器融合(374)
14.8飞行机器人(377)
习题(381)
第15章汽车式移动机器人(382)
15.1简介(382)
15.2运动学建模(384)
15.3机动性(389)
15.4动力学建模(393)
15.5运动控制(395)
习题(399)
第16章运动规划(401)
16.1空间(401)
16.2广义维罗尼图法(405)
16.3单元分解法与全覆盖路径规划(407)
16.4基于采样的运动规划(410)
16.5人工势力场法(413)
习题(416)
附录A符号与术语(417)
附录B术语中英文对照(421)
参考文献(425)
AI助教
智能体