图书
图书 资源
资源


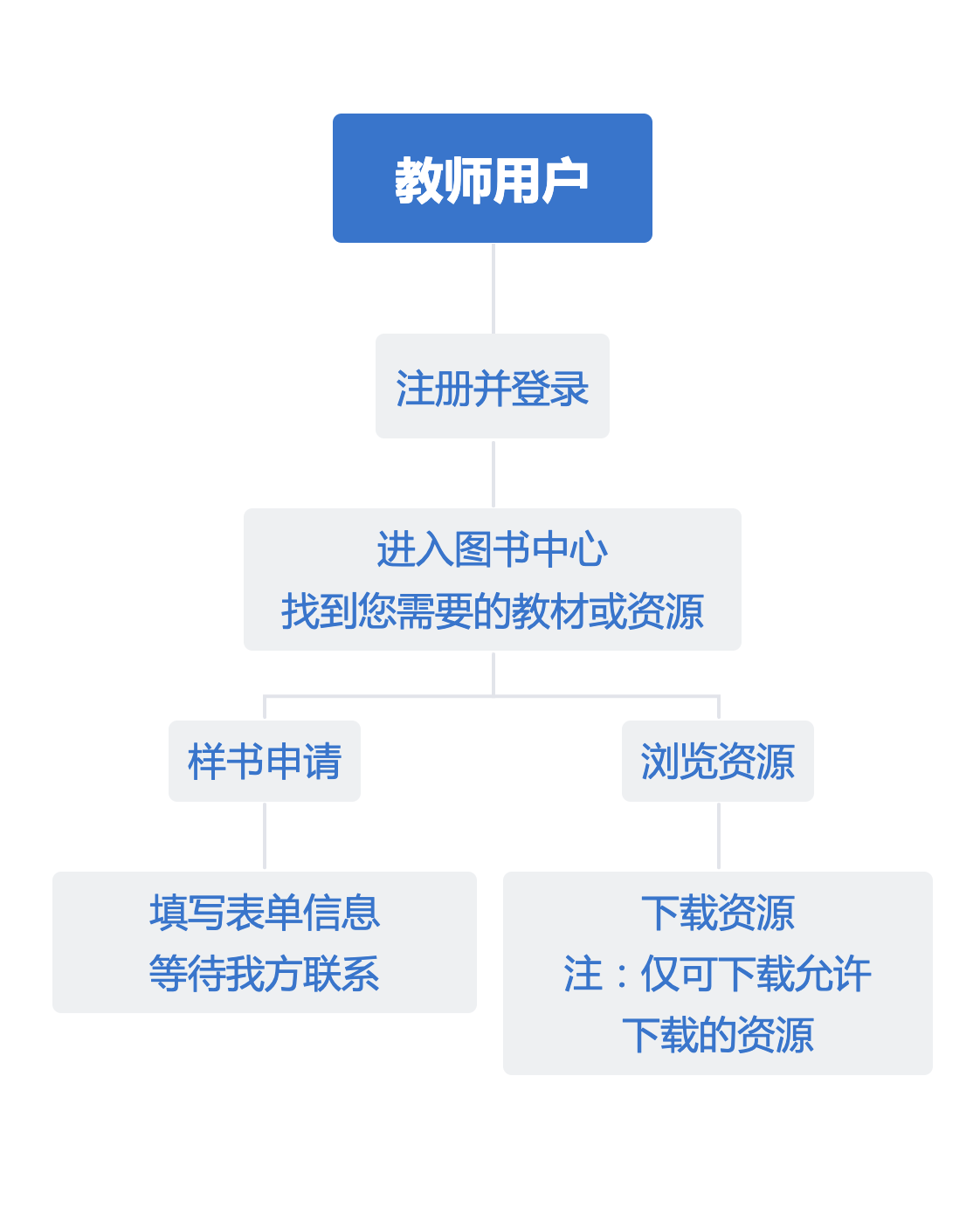
 教师服务直通车
现代康复医学资源库
教师服务直通车
现代康复医学资源库

- 工业机器人操作与编程(第二版)
- 作者:王素娟
- 策划编辑:张少奇
- ISBN:978-7-5772-2029-1
- 图书开本:16开
- 出版日期:2025-08-28
- 定价:42.80元去购买
-
新形态教材:
- 二维码资源
- 视频资源
- 学习码验证
- 所属丛书:普通高等院校‘’新工科‘’创新教育精品课程系列教材
图书简介
本书共分为五个章节,第一章介绍了工业机器人的共性知识,包括工业机器人的概念、分类、组成和主要参数,从第二章开始,以ABB机器人为对象,详细介绍了工业机器人的手动操作、输入输出设置、编程以及ABB的离线仿真软件RobotStudio的基本应用,包括在仿真软件中建立模型、工作站及离线编程操作等。使读者对ABB工业机器人及其操作和编程有了一个较为全面而且详实的掌握。本书深入浅出,贴近现场应用,既可作为应用型本科院校和高职院校工业机器人技术、机电一体化、电气自动化等相关专业的教材,又可作为工业机器人应用的培训教学用书,还可供从事工业机器人操作与编程的专业技术人员参考。



书籍目录
第1章工业机器人概述(1)
1.1工业机器人的概念(1)
1.2工业机器人的发展(1)
1.3工业机器人的组成(4)
1.4工业机器人的分类(8)
1.5工业机器人的主要参数(12)
习题(15)
第2章工业机器人的手动操作(16)
2.1工业机器人的安全机制(16)
2.2机器人坐标系和动作模式(17)
2.3示教器(21)
2.4手动操纵机器人(24)
习题(38)
第3章机器人的输入/输出(40)
3.1机器人输入/输出信号的分类(40)
3.2ABB机器人常用标准I/O板(41)
3.3设定I/O信号(43)
3.4系统输入/输出(50)
3.5练习(53)
习题(54)
第4章工业机器人编程(56)
4.1认识机器人程序(56)
4.2RAPID应用程序结构(57)
4.3程序数据类型(58)
4.4基本编程指令(71)
4.5建立一个可运行的RAPID程序(79)
习题(91)
第5章RobotStudio仿真与离线编程(97)
5.1RobotStudio软件安装(97)
5.2RobotStudio简介(99)
5.3构建基本仿真工业机器人工作站(102)
5.4离线编程(128)
5.5构建搬运工作站(133)
习题(157)
附录ARAPID程序指令与功能简述(158)
参考文献(169)
AI助教
智能体