图书
图书 资源
资源


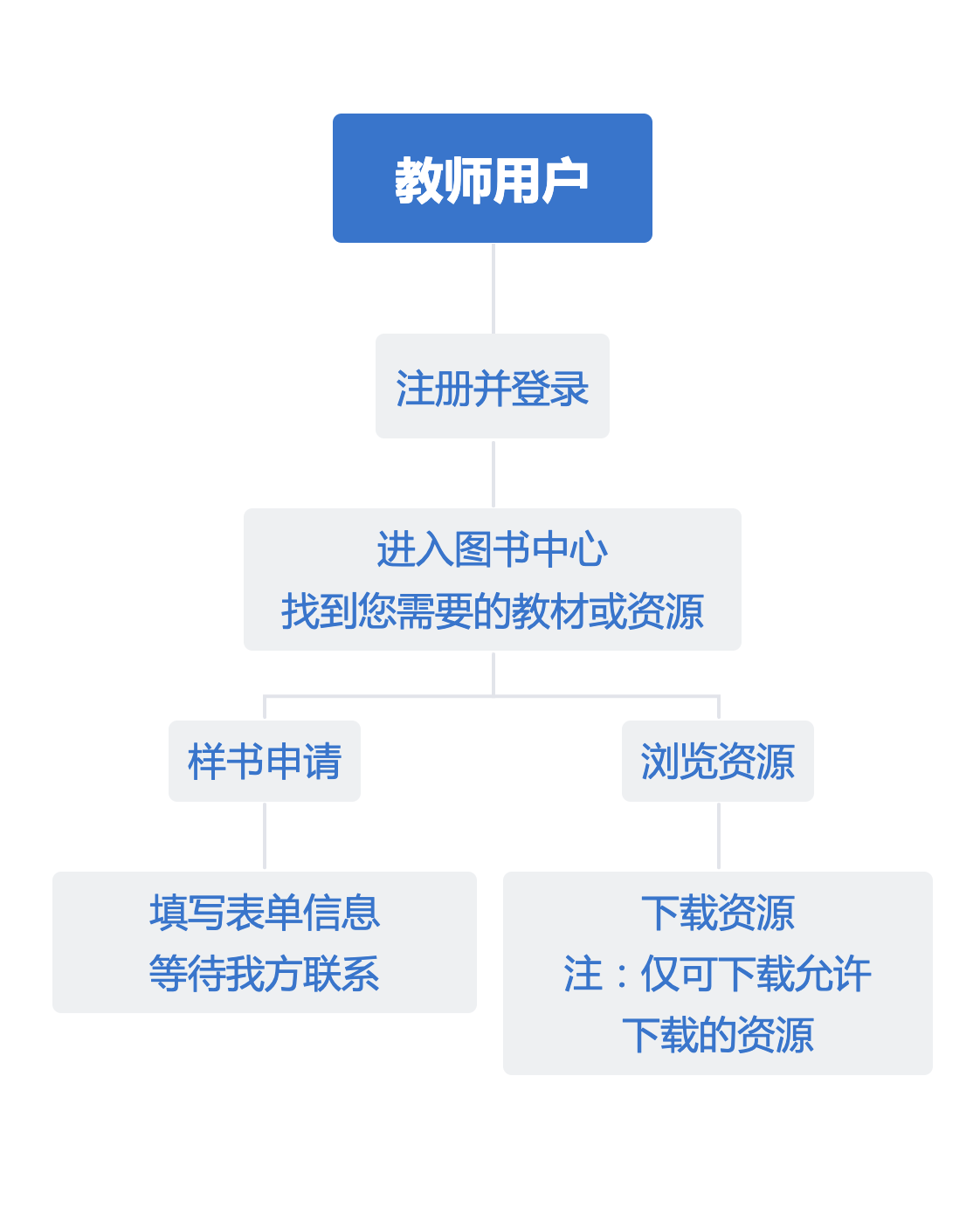
 教师服务直通车
教师服务直通车

- 工业机器人操作与编程(第二版)(叶伯生)
- 作者:叶伯生
- 策划编辑:俞道凯
- ISBN:978-7-5680-5365-5
- 图书开本:16
- 出版日期:2022-07-18
- 定价:39.80元
- 所属丛书:全国机械职业教育教学指导委员会“十三五”工业机器人技术专业推荐教材
图书简介
本书在介绍工业机器人概念、组成、分类和坐标系等基础知识的基础上,以华数HSR6工业机器人为主要对象,讲述了华数工业机器人的操作装置——HSpad示教器的使用,以及如何使用HSpad示教器实现工业机器人的手动操作,进而以写字、搬运、码垛、视觉分拣和智能产线等现实的工业应用为案例,基于加工工艺和编程指令,详细阐述了从运动规划、示教前准备、示教编程到运动再现的机器人应用全过程。最后介绍如何利用InteRobot离线编程软件实现机器人的离线编程。
本书理论联系实际,内容丰富翔实,有较高的实用价值。
本书可作为两年制中等职业技术院校机电一体化等专业,以及各类成人教育学院、高职院校、技校相关专业的教材,也适合作为各类工业机器人编程与操作培训班的教材,还可作为从事工业机器人技术研究、开发的工程技术人员的参考书。

书籍目录
项目一工业机器人基础知识与基本操作(1)
任务一工业机器人的基础知识(1)
任务二工业机器人的操作规范与安全(13)
任务三认识HSR6工业机器人的示教器HSpad(15)
任务四使用HSpad示教器手动操作HSR6工业机器人(22)
任务五HSR6工业机器人投入运行前的准备(26)
项目二HSR6工业机器人写字操作与编程(33)
任务一程序的新建、加载和编辑操作(33)
任务二标定工具坐标系和基坐标系(42)
任务三示教写字程序(48)
任务四运行写字程序(56)
项目三HSR6工业机器人搬运操作与编程(60)
任务一示教搬运程序(60)
任务二运行搬运程序(66)
项目四HSR6工业机器人码垛操作与编程(68)
任务一码垛程序算法介绍(68)
任务二算法实现码垛程序(71)
项目五机器人视觉分拣应用编程(76)
任务一机器视觉系统的功能与原理(77)
任务二随动式相机视觉引导系统的调整与应用(80)
任务三固定式相机视觉引导系统的调整与应用(93)
项目六智能产线系统工业机器人应用编程(114)
任务一智能产线系统基本功能及各模块介绍(114)
任务二机器人与智能产线设备通信(122)
任务三智能产线工艺流程(125)
任务四机器人程序编写(128)
工业机器人操作与编程目录 项目七InteRobot机器人离线编程软件的应用(133)
任务一InteRobot安装方法(133)
任务二InteRobot各功能模块介绍及使用方法(136)
任务三InteRobot离线工作站搭建方法(151)
任务四InteRobot离线写字应用(157)
任务五InteRobot离线喷涂应用(164)
参考文献(176)
AI助教
智能体